Mini RHex Family
Inspired by RHex and MiniRHex, we extend the concept to consider different number and type of legs. In the near future, we hope to extend the family to include ROct and RWhe. Software simulation for controls is also being developed using the Gazebo simulator with integration with ROS modules in mind.
This robots will be the platform for several projects in the future including research on VSLAM, Reinforcement Learning (RL), manipulators, etc.
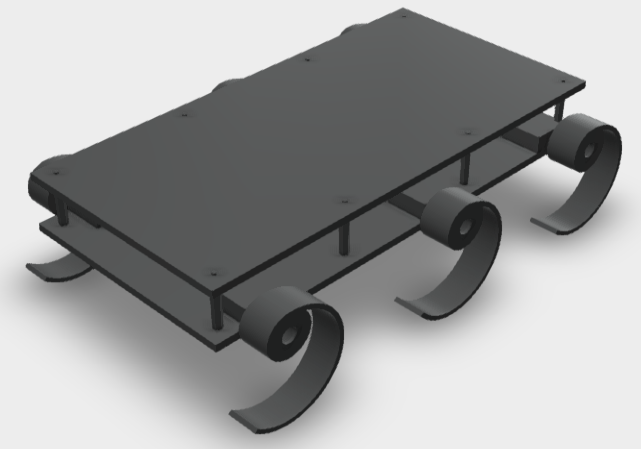
Rough CAD of a RHex prototype.